
STMicroelectronics, DETECTION OF DEFECTS ON SILICON WAFERS
Applications Web / Cloud / Computer Vision / Deep Learning / Industrie













Skills and Cooperation
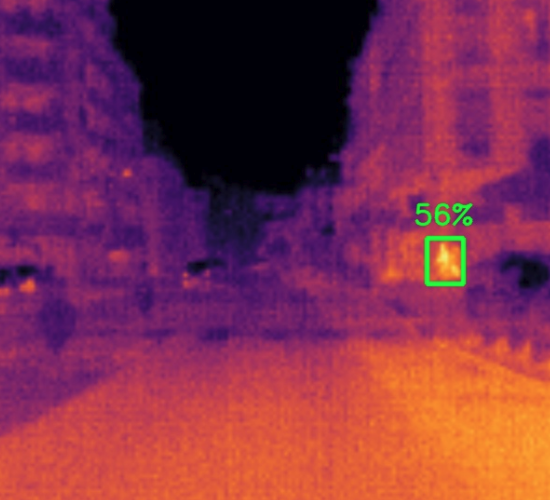
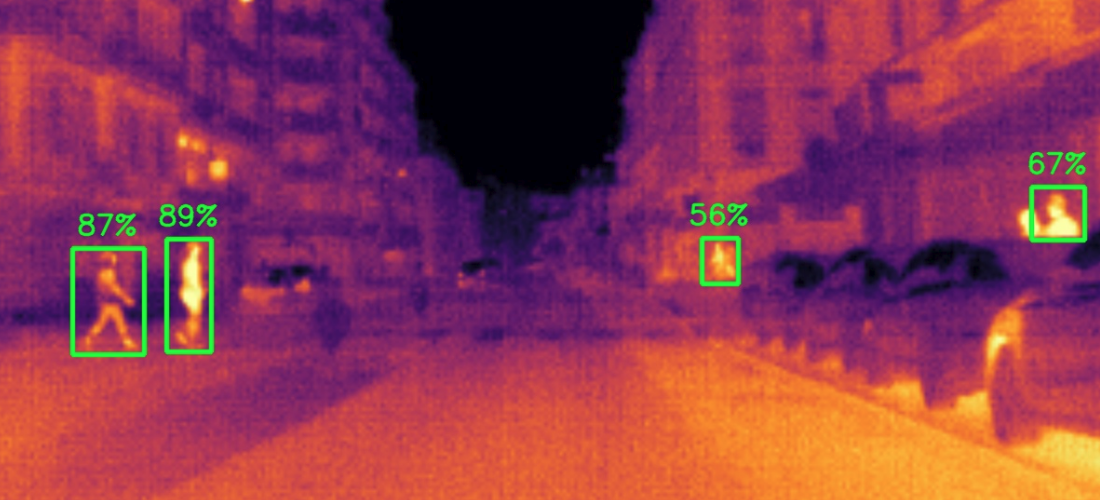
« One of the major problems for autonomous vehicles is the ability to detect VRU (Vunerable Road Users = pedestrians, cyclists, scooters) and this in all visibility conditions (including night, headlight glare, tunnel entrances/exits, smoke, fog, etc...). The current systems mainly use visible cameras which are in difficulty or even inoperative in these situations. Thermal infrared cameras can address these difficult situations with great efficiency. There remains the problem of data fusion: how to optimize the pedestrian detection function by making the most of each sensor (visible + infrared)? We called upon Neovision, which was able to take charge of all the phases of the project: state of the art of the possible fusion modes, prototyping of the most promising architectures, constitution of a consequent database (driving with recording of approximately 1M images on 2 visible cameras and 2 IR cameras), training, optimization of the performances, tests, and finally integration in a live demonstrator which had to function in real time. In the end, it is a neural network that outperforms classical architectures by improving performance in all situations, a co-authored publication, and a working real-time demonstrator! Dealing with a complex problem like this can only work if the teams are competent and if they cooperate. This is the last point I would like to emphasize: it is also thanks to the good cooperation of the Neovision teams with our teams that we were able to achieve such results. »

Pragmatism and reactivity
« Neovision was able to quickly take into account the multiple technical constraints of the project. We appreciated Neovision's pragmatic and reactive aspects as well as their varied skills in the field of algorithms, which allowed us to efficiently explore and test various solutions. »

State of the art knowledge
«Neovision worked with the WineAdvisor image recognition tool. The Neovision team was able to adapt to the surrounding context and to meet our more than demanding requirements in terms of deadlines and efficiency. They fully respected our needs and created interfaces and processes that met our expectations at the beginning of the project. Their knowledge of the state of the art of algorithms and their skills in understanding and programming allowed us to successfully complete our projects and I will not hesitate to call upon Neovision again. »

Understanding and appropriation of the customer need
« During our first meeting, the Neovision team was able to understand our needs and quickly put them into practice. We appreciated their autonomy on a complex subject. The result was as good as the skills they sold us and was quickly integrated into our system. Their desire to progress and their ease in extending their field of competence on R&D subjects in image processing will certainly lead us to call upon them again. »

An extremely rewarding collaboration
« The collaboration with Neovision was extremely enriching: a team that understood our project and accompanied us in the creation of a recommendation algorithm, both on the consulting and technical aspects. Beyond a simple service, the team was passionate about the business and the applications of the algorithm that we were able to develop together, and helped us in its handling and its overall understanding to achieve an effective production afterwards. »

Listening to customers in order to provide solutions adapted to industrial issues and constraints
« Neovision was able to work efficiently to meet our initial requirements as well as to adapt to last-minute constraints related to the Research and Development projects we entrusted to them, which in essence evolve and adapt as the study progresses. This adaptability and agility allowed us to obtain convincing results for our project. The team that makes up this company is dynamic, innovative, organized, punctual and attentive to its customers in order to provide solutions adapted to our challenges and industrial constraints. Moreover, it demonstrates a concern for work well done in order to produce results in adequacy with the requirements of its customers. »

Collaborate with Neovision to position ourselves as leaders
« We have collaborated with NEOVISION to position ourselves as a leader in machine learning applied to structural monitoring data of infrastructures and superstructures. Thanks to our disruptive NEURON system and the first results of this collaboration, Morphosense confirms its leadership in advanced data processing for predictive maintenance of structures. The following follow-ups to this collaboration have already been identified.»

A company of real specialists in Artificial Intelligence
« We were looking for a company with real specialists in Artificial Intelligence to create optimization functions for our order shipments. I discovered Neovision during the BlendWebMix trade show in Lyon where Lucas Nacsa was giving a conference on AI in e-commerce. Neovision developed two algorithms based on operational research to optimize the loading of products into boxes and then to optimize the loading of packages into our trucks. The project was framed, developed and put into production quite quickly, and it gives complete satisfaction.»

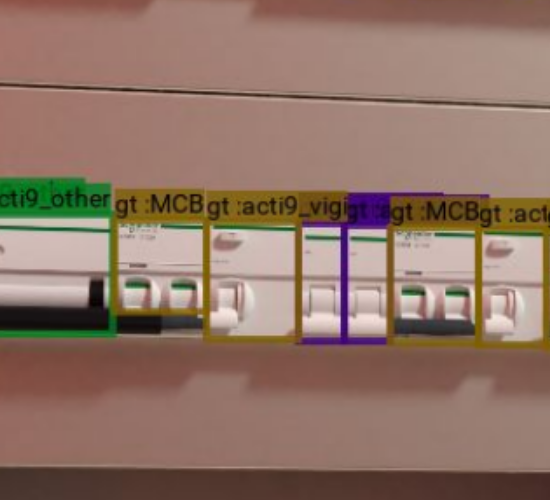
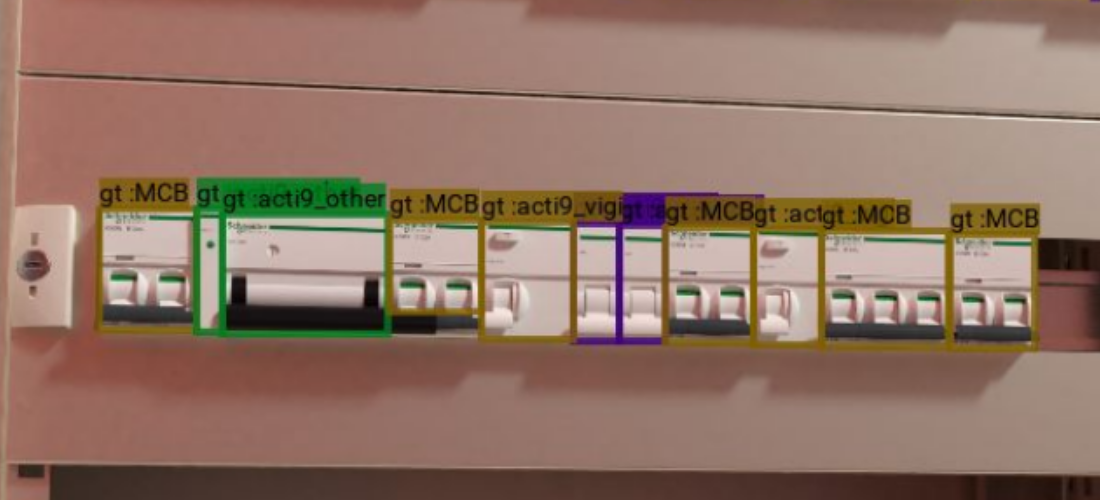
Image recognition expertise for a "wow" effect
« As part of an innovation process, we asked Neovision to help us develop an algorithm to recognize our equipment using photos. Throughout the project, Neovision used its expertise in the field of image recognition to help us define our needs, and then developed a solution that would allow us to determine the technical feasibility. The prototype we ended up with allowed us to convince internally of the relevance of the subject and triggered a Waouh effect. We really appreciated our collaboration with the Neovision team because they quickly understood our needs and were able to react to the different changes we had to make. All this within the framework of a very friendly and enriching relationship. »

Listening, analysis, support and adaptability
« The collaboration with Neovision has been very fruitful. The team distinguished itself by its ability to listen, analyze and support. Throughout the study, the technical orientations proposed were justified, documented and relevant. We appreciated their ability to adapt to the subject. Their level of expertise in artificial intelligence finally convinced us to choose Neovision. »

A final result that goes beyond our expectations
« We were delighted to collaborate with the NEOVISION team on this very innovative project in the field of transportation. The specifications were respected and the final result goes beyond our initial expectations. If we had to underline the strong points of the team I would say: Very deep understanding of the problem and our expectations - Ability to provide ergonomic and functional deliverables - Respect of deadlines. New projects are waiting for us and I can't wait to start!»

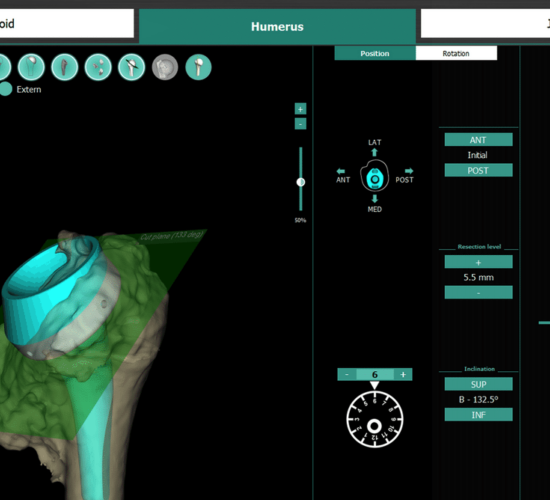
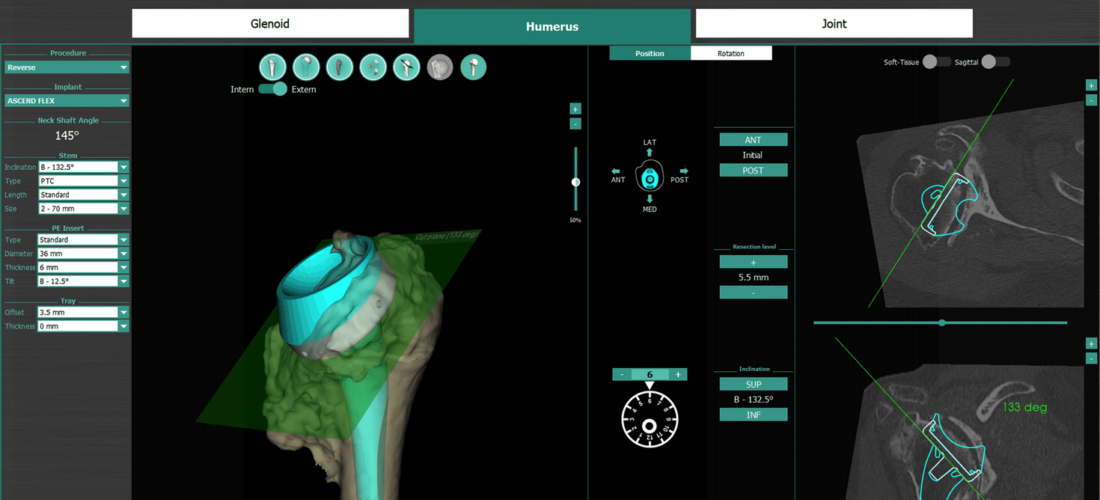
Wright has selected Neovision to support our AI algorithms
« Wright is the leader in digital surgery in orthopedic extremities and focused to provide innovative and transformative software-enabled surgery platforms and solutions. Wright has selected Neovision to support our artificial intelligence algorithms to improve surgical planning and support improved patient outcomes.»

Neovision has a key role to play in the development of AI
« Processors are only part of the solution, and the vast majority of customers wishing to develop an intelligent application are missing an essential skill, which allows them not only to define the appropriate algorithms, but also to know how to optimize them by making the best use of the available computational resources: this is the skill that Neovision offers, and which you and your colleagues demonstrated by helping us to implement, in record time, a Smart Office demonstration that we wanted to carry out to present the capabilities of our configurable IP allowing the implementation of neural networks. This demonstration was indeed a success, in particular because it demystified the subject, showing how a particular problem could find an accessible solution! Neovision certainly has a key role to play in the development of the ecosystem that will enable the deployment of embedded AI, and ST is very pleased with the collaboration initiated at MWC18.»

Neovision has established a relationship of trust and has a real expertise
« We have been working with Lucas and the Neovision team for the past 5 years on our various problems related to image analysis. Neovision has established a relationship of trust and has real expertise in these areas, from Proof of Concept to industrialized solutions. In addition to their skills (AI, image processing) and their level of requirement, we appreciate the state of mind at Neovision, which is close to ours! »


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}